
Heavy traffic, extra Look out posted, hours of darkness. Suddenly the GPS is gone !!! Ever experienced this ?
Believe me when it happens, you start doubting each and every equipment. Even the ones which may be working fine at that moment.
Is the gyro giving correct heading ? Is the echo sounder showing correct depth ? You will doubt everything !!! That’s not good.
You will loose the sense of direction. And you would have tiny amount of time to regain the sense and act in a way that is right.
The entire navigation depends upon knowing the position of the ship. This is one of the most important task of a navigator.
But when I say position, I do not only mean GPS position. There are many other ways of plotting the ship’s position. And as with the situation of GPS failing, we must be ready to switch to other methods of position fixing.
Before we proceed with discussing these methods, I must discuss a term which is so much a part of passage planning. The term is “position Fixing Interval”.
Position Fixing Interval
“Position fixing interval” is the maximum interval between two position fixes. So if in a particular section of the passage, we have agreed to the PFI of 01 hour, we must plot the ship’s position at least every hour.
But how do we decide the position fixing interval ?
For that just think why do we need to plot the position ? We plot position to be sure that we are on our track and not drifting towards a danger.
With that logic in mind, let us take an example.
I plot a position at 0800 Hrs. The agreed position fixing interval is 30 minutes. Now just after 0800 Hrs, the vessel starts to draft directly towards a danger.

I will only come to know about that at 0830 Hrs when I plot the next position of the ship. If at 0830 Hrs, vessel is at the danger then the PFI was set too high.Because before we could know that we are running into danger, we already were at the danger.
So even if vessel deviates from its course, the interval between two consecutive position fixes should be such that allows time to take the course corrective action.
Method of position Fixes
There are many methods by which we can get a fix of the ship’s position. Some of which are
- Celestial fix by using sextant
- Visual fix
- Radar Fix
- GPS
- Echo sounder
- Parallel Indexing
Primary method of position fixing
One of the element of passage planning is to identify the primary and secondary method of position fixing at each leg of the passage.
There should always be at least two method of position fixing.
Now at open sea, the primary method is GPS and secondary method would be “celestial fix”.
 If there is a radar conspicuous object, the primary method of position fixing becomes the “radar fix”. Secondary in this case would be GPS.
If there is a radar conspicuous object, the primary method of position fixing becomes the “radar fix”. Secondary in this case would be GPS.
Now if that object is also visible, primary method becomes the “Visual fix”. In this case secondary method will be “Radar fix”.
The idea is that Visual fix gets the highest priority followed by radar fix. And radar fix gets the priority over GPS.
On tankers the vetting inspectors expects that if available visual and/or radar fixes must be plotted at least for the PFI.
For example let us say that the set PFI is 10 Minutes and the agreed position fixing method is Radar and Visual fix. Let us say we plot position at
- 0900 Hrs: Radar or Visual Fix
- 0910: Position by GPS
- 0920: Radar or Visual Fix
This is considered to be wrong and would draw a vetting observation as the radar/visual position is plotted after 20 minutes where as PFI is 10 Minutes.
Celestial Fix using sextant
This method is not so popular during coastal navigation because of few reasons.
One because this method requires some time to know the position because of calculations involved.
Second because there are chances of user induced error (like error in taking the sight). That may not be so nice when ship is navigating in the proximity of dangers during coastal navigation.
But there is a gross misconception about this method among many seafarers. Misconception is that position by celestial observations are not accurate.
Instead, if we can have our hands set perfectly to take accurate sextant altitude, the position obtained by this method are quite accurate.
There are few disadvantages with this method.
Even though this method do not rely on electronic equipments and satellites but it need nature in our favour.
We need clear sky and clear horizon so that we can measure the altitude of the celestial body.
Even when the sky is clear, it is difficult to measure the sextant altitude when ship is rolling.
“How to use sextant to get the ship’s position” is too big a topic to fit in this post and I will write on that in detail on some other day.
Position by GPS fixes
Do I need to say anything about GPS fixes ? Even the supernumaries on board know how to plot GPS position.
This is most over relied method of position fixing. Over relied for a good reason. It is Crisp accurate (most of the time) and quick fix.
On Modern ECDIS, navigators do not need to do anything in plotting the GPS positions. These are plotted automatically at the set interval.
Some ECDIS can even record the ship’s position when it senses change in any parameters like change in course.
For the passage planning we must ensure that PFI is set in the ECDIS, so that GPS positions are marked and recorded automatically in the ECDIS.
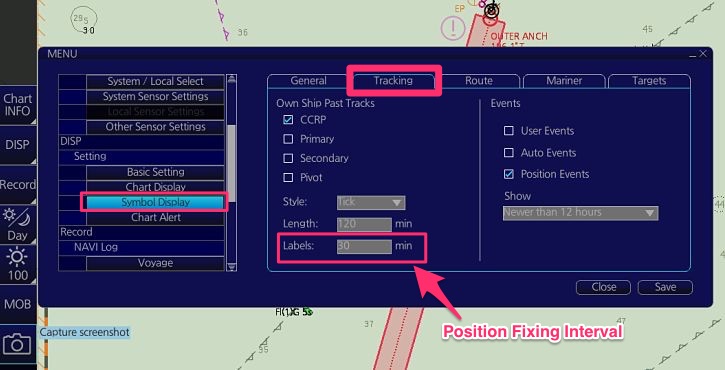
To set the PFI in furuno ECDIS, go to DISP -> SET -> and then choose Symbol DISP.
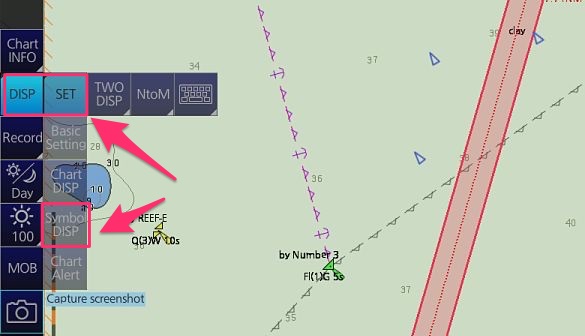
Now go to Tracking. The Position fixing interval can be set under Labels. Once set, the GPS position will be recorded at the mentioned interval.
GPS fixes are accurate, no doubt about that. The only issue with GPS fixes is the Complacency and over-reliance. Over-reliance to the extent that we may find ourself unconfortable if the GPS fails.
Radar Fixes
Position by radar gives quite accurate results and must be used whenever we have radar conspicuous objects.
The advantage with radar fixes is that it just needs one object to get the ship’s position. We can get the range and bearing of this object and plot the same on the chart.
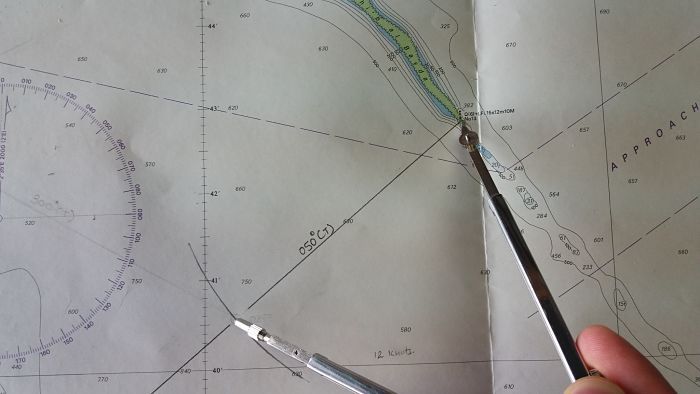
For example let us say we get the bearing of this light as 050 degrees and range as 4.4 NM.
We will draw a line of 050 degrees to this light. We will then measure 4.4 NM on the compass and cut the bearing line with this distance.
In the same way, if you have two objects, you can plot the radar fix by number of combinations of position lines like
- bearings of these two objects
- bearing of one object and range of other object
- range of both objects
As more and more ships are moving to the paperless navigation, we must know how to fix the ship’s position by radar on ECDIS.
So let us fix the ship’s position on Furuno ECDIS.
Let us say for this island, we get a bearing of 010 Degrees and distance 2.5NM from the radar.
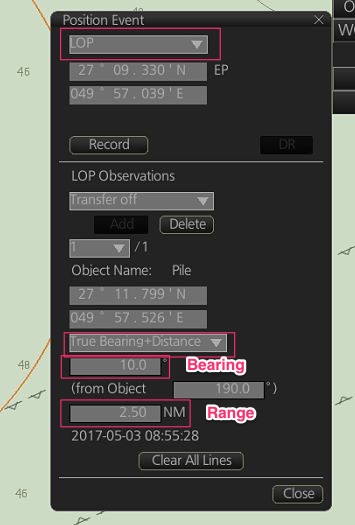
On Furuno ECDIS go to Record -> This will open a position event window. Choose LOP and then choose True-bearing + Distance option.
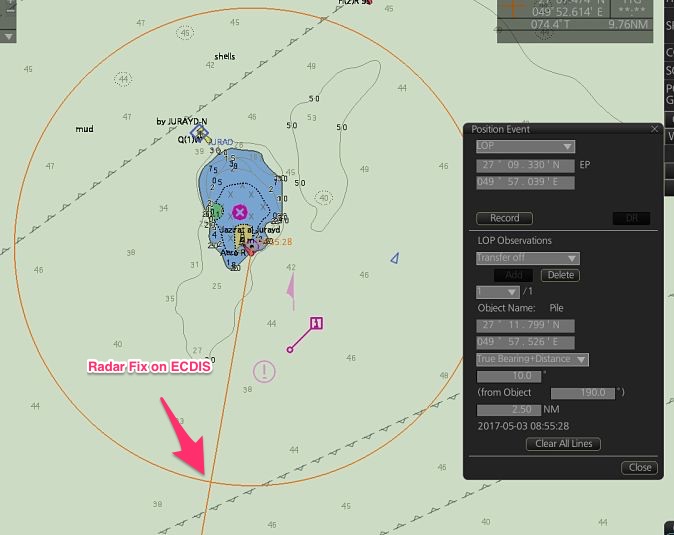
Now click on the point of the island for which the bearing and distance were taken from the radar.
Now enter the bearing and distance in the position event window and then click “Add”.
This will give you your position.
Now if you wish to record this position in the memory of ECDIS, click “Record” in the position event window. The position will be plotted on ECDIS and recorded in the memory.

If we have two bearings (or two range) of two objects, the process of plotting radar fix on ECDIS is same as above. Just instead of “bearing + Distance”, choose “bearing” (or distance) option.
Visual Fixes
Visual fixes are least practiced position fixing method inspite of being accurate. All it requires is a visual target and compass for taking its bearing.
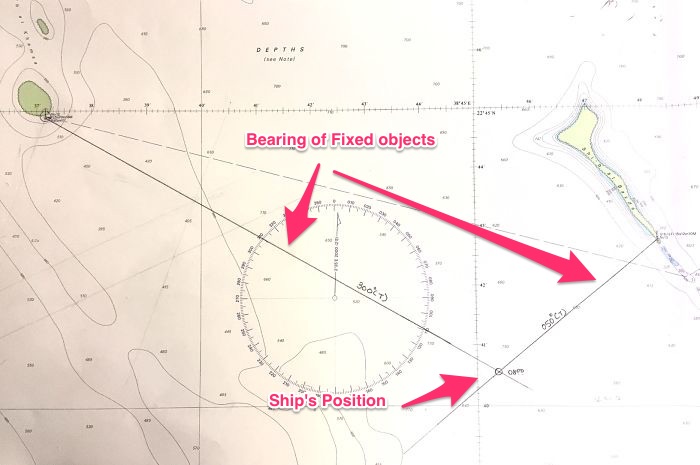
Position by Visual bearing of two objects
If we have two objects that are visible from the ship, the bearing of these two can get us the ship’s position.
For a better accuracy of position by two bearings, the two bearings should neither be too narrow nor too wide. Separation angle close to 45 degrees being the ideal one.
To plot the position by visual bearings of two objects, take the bearings of both the objects simultaneously.
Now draw the bearing of these objects on the charts. The point where these two bearings (position lines) intersect will be the ship’s position.
How to do this on ECDIS ?
The process is same what we did for plotting radar fix on ECDIS.
Position by Running Fix
Even when there is only one object visible for visual bearing, we can still get the position. The method is called “running fix”.
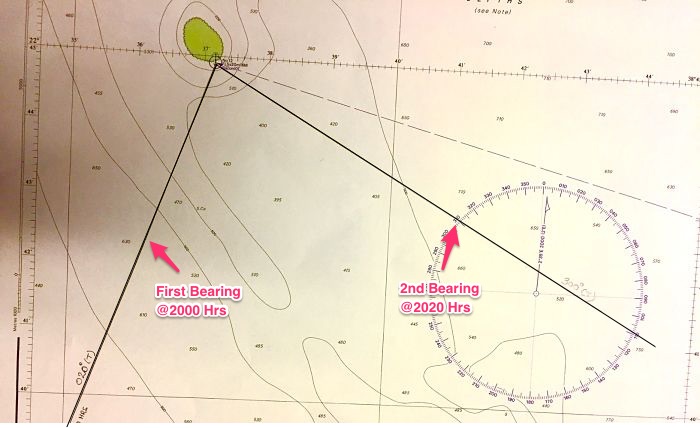
In this method, we take the first bearing of this object before when it is forward of our beam. Let us say we see a light Fl 5s 20m 16M. At 2000 Hrs we take its bearing and it comes out to be 020 degrees.
Plot it on the chart. This is the first position line at 2000 Hrs.
Take the second bearing of same object when it is abaft the beam. Say this time we take the bearing at 2020 and the bearing is 300 Degrees.
Plot it on chart. This is the position line at 2020 Hrs.
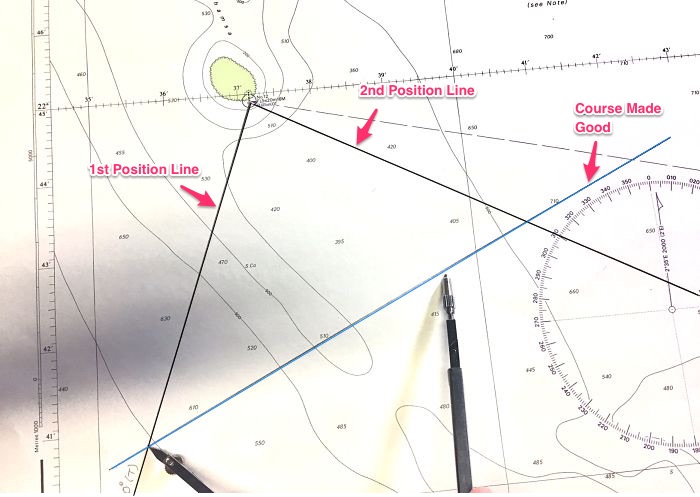
Now we have two position lines but both are at different times. We need to bring either of these position lines to the same time as the other one.
How do we do that ?
We know our course made good and speed, plot the this on the chart. Now on this course line cut the distance covered in 20 minutes which is the interval between two position lines. Let us name this point as point A.
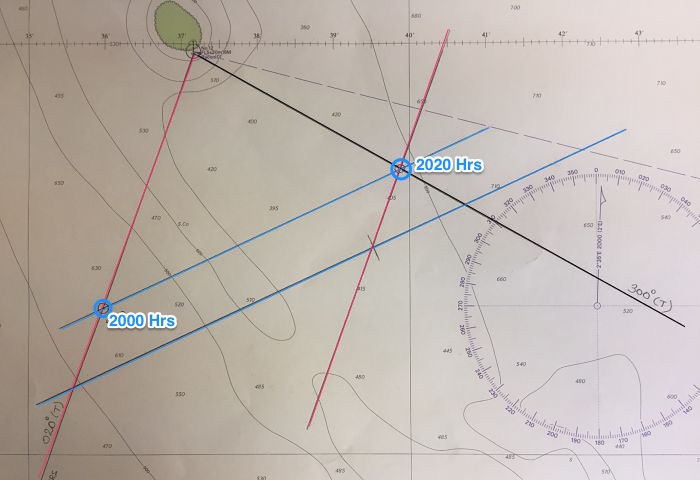
Now transfer your first position line to the point A. The point where it cuts the 2nd position line is the ship’s position at 2020 Hrs. This is because now both the position lines are at same time.
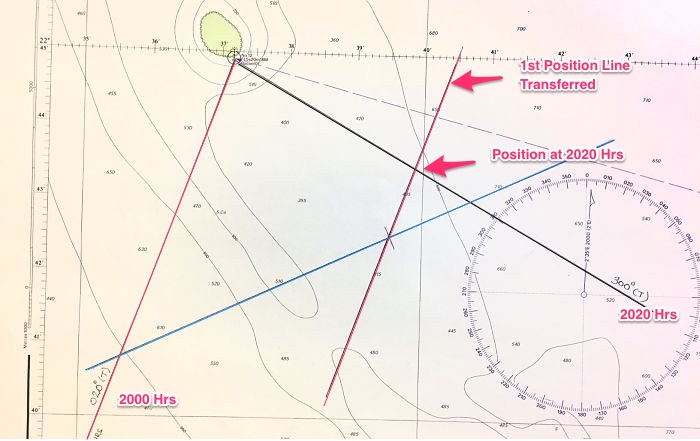
To get the position at 2000 Hrs, draw your course made good from the 2020 Hrs position. The point where it cuts the first position line will be the ship’s position at 2000 Hrs.
How to get running fix plotted on ECDIS ? Let us plot this on furuno ECDIS.
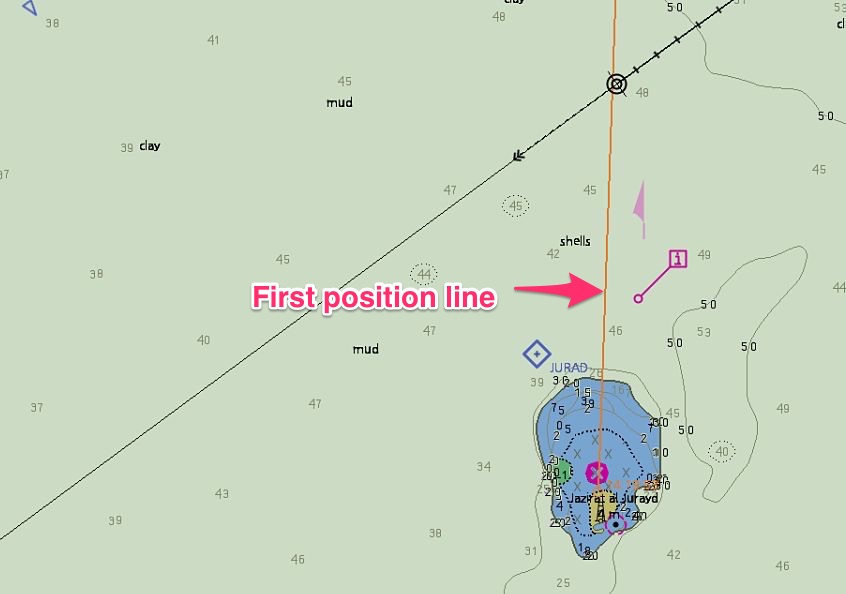
We take the first bearing of the fixed object and we plot first position line on ECDIS. To do that from the left menu options go to Record -> Event log -> Posn event.

This will show a pop up called position event.
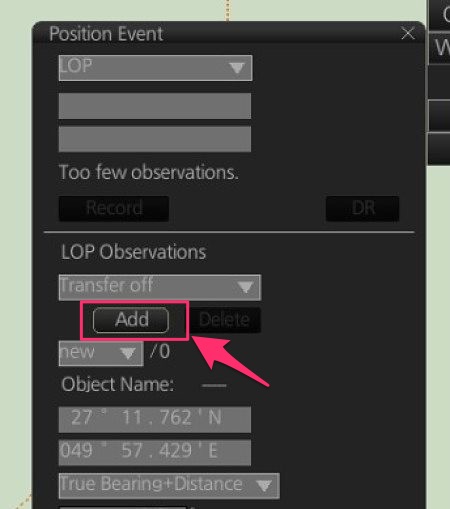
Mark the first position line of the fixed object that you have taken the visual bearing from and click “add” to add the position line.
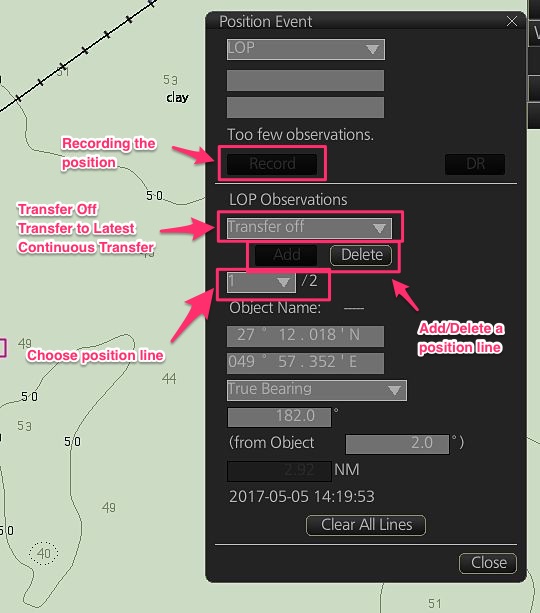
Now when you have the 2nd bearing of the same object, mark the 2nd bearing on the ECDIS in the same way. Make sure the option “transfer off” is slected while marking both the bearing.
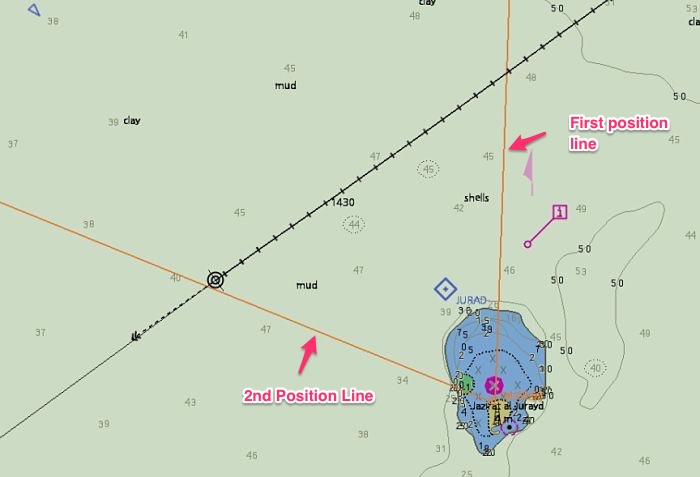
So we have the two position lines but both are at different times. We need to transfer the 1st position to the present time to get a fix by “running fix” method.
To do that, choose the position line number 1 from the position event pop up (under LOP observations).
Then change the option to “Transfer to latest”.
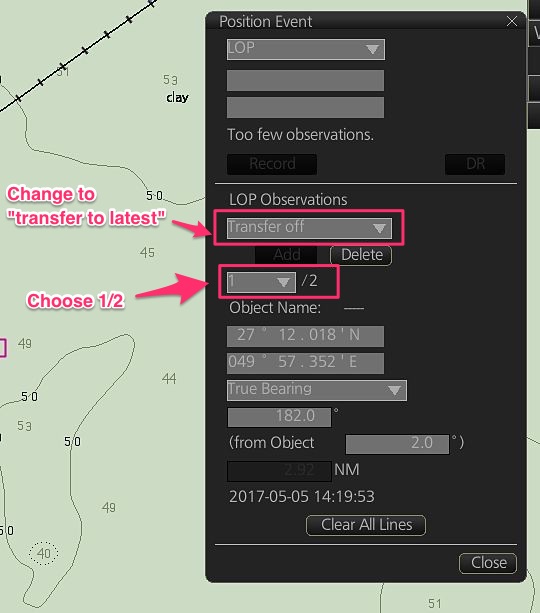
Once we choose “transfer to latest” option for position line # 1, this position line will be transferred to the latest time. You will also see TPL marked on this position line which denotes “transferred position line”.
The position where it cuts the 2nd position line is the ship’s position.
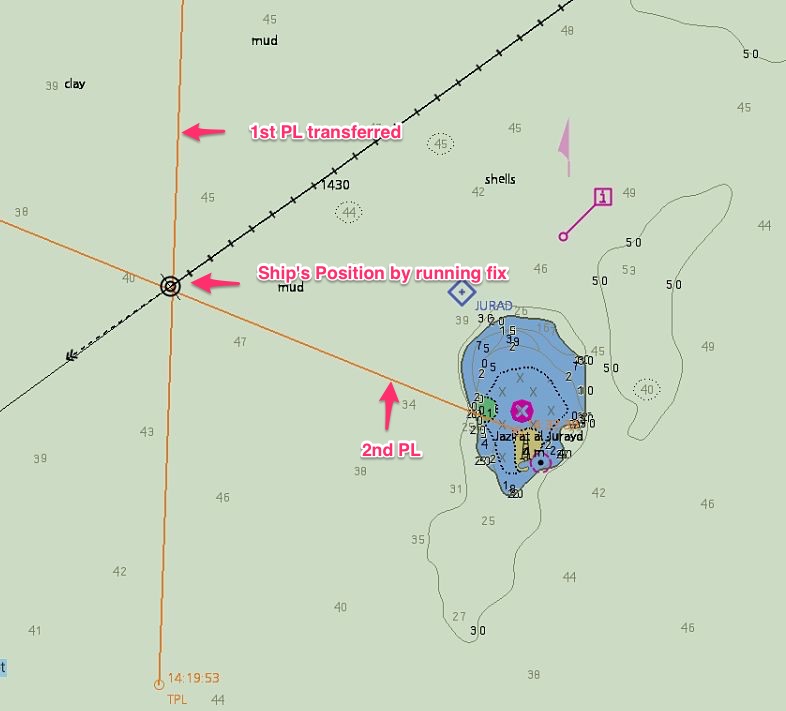
The position where it cuts the 2nd position line is the ship’s position. To record this position in the history data of ECDIS, just click on “record” option in the “position event” pop up. This will mark the ship’s position on the ECDIS and save it in the history data.

Position by Echo Sounder
I am sure not many discuss this as the position fixing method. Rightly so. We have so many resources and we do not need to rely on echo sounder for position fixing.
But as I said, when the GPS fails we start doubting everything and each equipment. More methods of reassuring us about position can be handy.
Echo sounder cannot be used as a position fixing tool but it can be used to confirm the known position of the ship.
Have a look at this photo. This could be one of the place where we can ascertain our position by echo sounder.
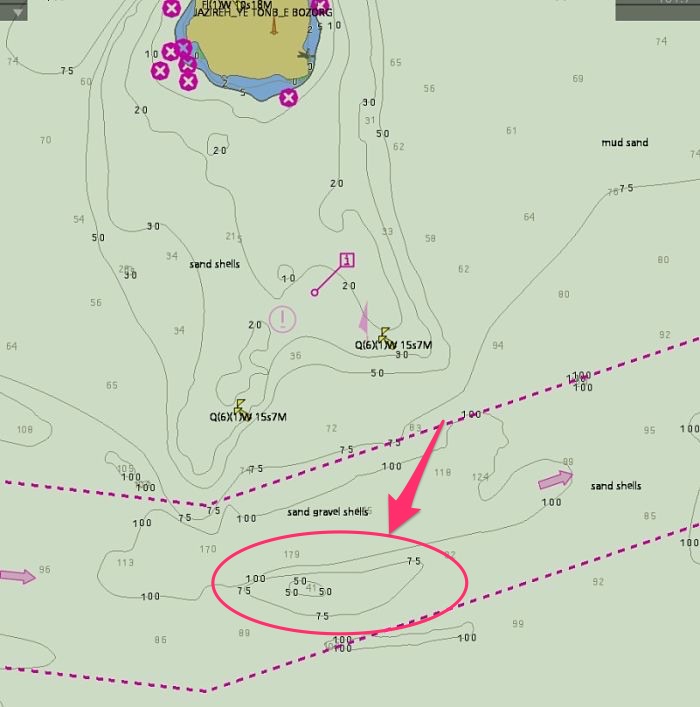
If we see depth of around 40 meters on echo sounder and at the same time we take bearing of the edge of the island that is visible to us. We draw position line from this island.
As there is only one point on this position line where the depth is expected to be around 40 meters, this will be our estimated position.
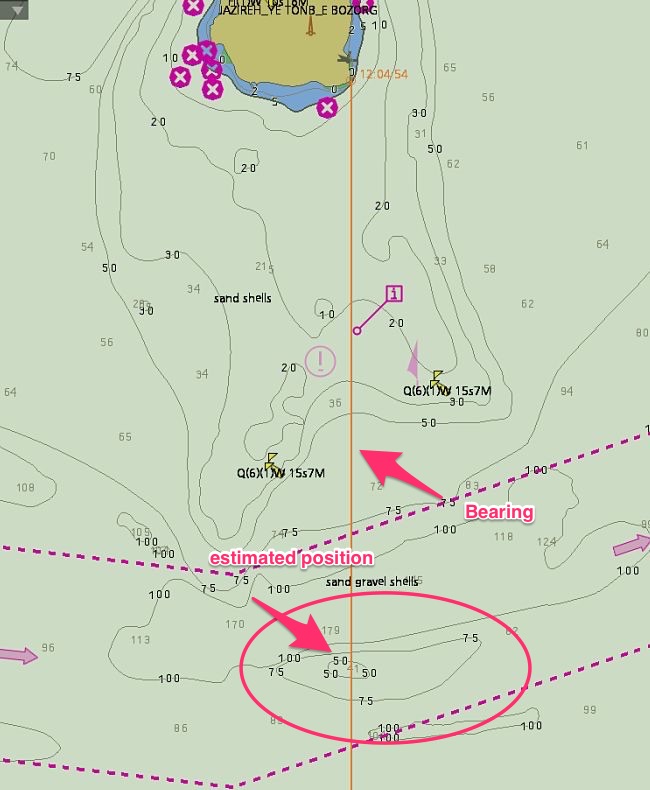
As I said this is not the position fixing method. But we can use this as a confirmation tool for the position we get from other methods.
Parallel Indexing
We earlier discussed that the interval between two position fixes should be such that between any two fixes, the vessel must be safe.
But this would mean that during arrival into a port, we need to plot our position every 60 seconds.
Many, including some third party inspectors may insist on this but this is crazy. Imagine plotting the radar fixes every two minutes.
Sometimes even the chart would not be of such large scale that can distinguish the two positions plotted at two minutes interval.
I feel PFI of less than 5 minutes is not practical. So how do we ensure ship does not run into danger if PFI need to be less than 5 minutes and we plot the position every 5 minutes ?
The answer is by “parallel indexing”.
We identify a fixed object and draw a line parallel to our course. We then monitor the echo of this object on the radar.

If the echo stays on the line drawn parallel to the course, we are on our course. If the echo deviates from the line, we are off track and we must alter the course to bring the vessel on track.
This is a method which ensures continuous monitoring of the ship’s position.
In the situations where PFI comes out to be less than 5 minutes, we can set the PFI as 5 minutes and then monitor the ship’s position by parallel indexing and plotting the position every 5 minutes.
Parallel indexing is a fantastic tool for monitoring the ship’s position. For this reason, it must be used wherever a radar conspicuous object or landmark is available.
Conclusion
There is one basic requirement that a navigating officer on watch need to fulfil. At all times he must know
- Where we are, and
- Where they (other targets) are
Sadly most of the groundings happens because we either do not know one of these or both. If we know all the methods of plotting and then confirming our position, we will never miss out where we are.
With now more and more ships going paperless, we must also transform ourself to be able to use these methods on ECDIS.
Share this:

About Capt Rajeev Jassal
Capt. Rajeev Jassal has sailed for over 28 years mainly on crude oil, product and chemical tankers. He holds MBA in shipping & Logistics degree from London. He has done extensive research on quantitatively measuring Safety culture onboard and safety climate ashore which he believes is the most important element for safer shipping.
Search Blog
54 Comments

An excellent and understable way prsented.You must be in teaching business. Please meet another old teacher.Do keep in touch.

Thank you Sir. No, I am not into teaching. I am just trying to give the salt back to sea..
Dear Sir, very good morning !!! Thanks for easily explain and very useful. Regards, Raman
Glad you found it useful Raman..
Sir, Excellent effort ....for made simply understand..Thank you very much, Sir.
Glad you found it useful Vijay...
Dear sir, I would like to ask you that if you have time, can you write a post about the radar techniques in using to manouever the ship during the coastal navigation. I really like it and as I know the ability of the 2nd mate will be identified through his using radar technique. Thanks in advance.
I will write on this topic in near future...
Many thanks Capt. Rajeev, excellent piece. Allow me a question please. VIQ states that parallel indexing should not be used with floating objects, but what about clearing bearings? I see that many navigators use Clearing Bearings with buoys. Is that acceptable?
Awesome!
do we need to put pfi intervals on ecdis chart as well as it is being done by the use of gps labels on ecdis? For instance i am getting time label of 10 mins each on my ecdis track and hence i am monitoring my position continuously still do i need to put pfi interval on user map?
Sir can we plot radar bearings directly to chart?
Dear Capt. Rajeev Jassal
Hi, how do we input celestial observation or position in the ECDIS?
good stuff. https://www.youtube.com/playlist?list=PLafMfVypK6pOlSQ8ukxo_MXEb2pWxCDZO
good stuff. https://www.youtube.com/playlist?list=PLafMfVypK6pOlSQ8ukxo_MXEb2pWxCDZO
how would i find out position plotting interval for a leg?
In open sea, position fixing interval is 1 hour. In coastal waters (when vsl is within 12 NM from shore), for ELECTRONIC CHARTS at interval of not more than 30 minutes with cross checks in between. For PAPER CHARTS, GPS positions to be verified by using simple formula for identifying PFI in coastal water: PFI= 1/2(D) ÷ (V/60), where D is the nearest distance of the shore or obstruction along your LEG and V is the vessel SPEED or planned speed of your passage.
Please in my deck logbook there is method to get position by obs or ac'nt Please can you explain what is the meaning of ac'nt
Pls ezplain about lop in ecdis
Thank you for sharing your knowledge
One thing I have noticed you have skipped the celestial fix plotting on ECDIS , would appreciate if you can explain how celestial fix was plotted on paper chart and how to do the same on an ECDIS ,so that we can co relate e.g. Longitude by Chronometer, Mer-Pass and Intercept . All 3 methods . I am using Transas Navisailor 4000 and I have no clue about it.
Can i take the fix using a bouy? If yes then which buoy?
Hello sir can you please tell the position plotting interval in ecdis
Thank you very much capt sir for ur efforts, it's really simple to understand .
Very appreciate for sharing your precious knowledge not only present post but also all post from MySeaTime blog. Most of comfuse things are clear after I read your post. Thank you sir.
Sir can you pls fiil in some more info on the use of eho sounder and logs when used as a means of position fixing
Dear sir, Thanks for sharing this knowledgeble information, one of the best idea that I/we must be learned as a seafarer. ????
Can someone advise can we plot position using light buoy??? If we can in which manual is it written??
In my previous comment I want to mention light vessel instead of light buoy..
It is very easy and full of information that you are provided on each topics, which is very helpful for COC exam as well as for practical sea life. Tks indeed.
What about DR fixes?
It's great that you mentioned that GPS fixes help automatically fix intervals and record the boat's position and not be over-reliant on it. My dad and brother are going on a fishing trip this weekend to the sea. I'll share this with them later. Thanks! https://wharf-marine-sales.myshopify.com/products/garmin-gpsmap-743-chartplotter-preloaded-us-canada-bahamas-bluechart-g3-lakev-g3-010-02365-01?_pos=1&_sid=581275453&_ss=r
Thank You Very Much Sir. Very nicely explained all aspects of position fixing.
Thanks alot for your time and efforts Really perfect
1. If you are in SSW how many degrees to the opposite side, and explain why and what Quadrant by applying boxing the compass? 2. Explain carefully the procedure why boxing the compass applying 11 +1/4 degrees, in order to determine and compensate by 360 degrees. 3. What is the Basic procedures to determine the object thru celestial observation and by bearing object with three methods to get the fix position. Explain? 4. 360 degrees is equal to 000 degrees north, in that location what action to be taken in order to compensate your gyro course by 315 degrees when you are turning to west and you going to locate the variation and deviation?Explain. 5. Explain what is the Latitude and Longitude and their functions? in relation to determine the fox position when you observing the bearing object thru compass especially the celestial bodies such as the sun, moon, stars, etc
Avec la montée des trolls sur Internet, trouver du contenu Web décent devient de plus en plus difficile chaque jour. Ce fut un soulagement de découvrir votre page Web. Je serais heureux d'ajouter de la valeur à votre contenu car nous pouvons vous aider ACHETER UN CERTIFICAT NCLEX EN LIGNE < /a> Continuez votre bon travail. bravo W.I-C+K.R.M:E//: yungreddgotit
With the rise of internet trolls, finding decent web content is getting harder everyday. It was a relief coming across your webpage. I'd be happy to add value to your content too as we can help you BUY NCLEX CERTIFICATE ONLINE Keep up the good work y'all. cheers W.I-C+K.R.M:E//: yungreddgotit
I really appreciate GARY MCKINNON for his great job and I'm here to tell whoever needs to fix their credit. He raised my credit to a very high score, far beyond my expectation. Just for your info, I’m not under any compulsion to do this 5 star review to a worthy fellow. My score was brought from 432 to 815 excellent and all the derogatory and criminal record got removed including the chexy system without leaving any trace He is very honest and he has helped me and several other people. You can get in touch with him on his email (GARYMCKINNONCREDITSERVICES@GMAIL.COM)
I observed him through google search recommended by individuals who he helped recover their lost funds from tricksters. I am in same circumstance and I wanted a solution so I could recover my funds. because I had terrible experience with the phony recuperation service ,i never accept i can find someone who is reliable, honest & legitimate until he prove his self right. Things have been so difficult for myself and I needed to get few assistance so I can move on and be free from obligations with family. He set me free and pay all my exceptional debt after recovering the funds. REACH HIM ON THIS DETAILS FOR HELP: PermanentCreditRepairer@Gmail.Com
Your credit is the most important thing to you , without your credit the world is empty , there is how to do anything with ease , only to do it with stress , Richard Pryce thought and let me know how important my credit is , now there is nothing I can solve financially with my good credit score , mail him now on RICHARDREPAIRCREDIT@GMAIL.COM to solve your credit problem and change your life.
Dear Sir, I would like to ask one question. For Example, when i took brg and distance of Radar Object and plotted on Ecdis Than there is discrepancy on ecdis but ENC are up ro date and WGS84. My question is that ship position can be offsetted? Do i have to add position offset? Because i can clearly see distance of Radar range and brg considering the counts of High of tide and Gyro Error.
The flashlight of an iPhone not only sheds enough light to help us in navigating the lost keys, reading in a camp, but it also allows us to lighting up the route or rocking out at a concert, etc.flashlight iphone not working visit.
Top 10 Echo is one of the best product review-based sites where you can get cheap and qualitative products. Get a discount before anyone else!
I was asked to give my thoughts on GEARHEADPANACEA.COM because I was pleased with how my score improved and how much they taught me. To whom it may concern, all I can say is that they are good at their job and if you need any cyber related help you can visit their website or email gearheadcyberpanacea@gmail.com
I'm happy to share my experience working with GARY MCKINNON since I had some bad credit reports that severely damaged my family and myself. I looked online to see what people were saying about him and decided to approach him via email after seeing their positive reviews. He resolved all of my report's concerns in less than 72 hours. If you have any questions about your credit scores please contact him right away GARYMCKINNONCYBERSERVICES@GMAIL.COM
It's a new month; don't begin with a poor credit record or low credit ratings.He can help you improve your credit score, remove any negative information from your credit report, and get back any BTC or ETH that has been lost or stolen. In less than 72 hours, GARY MCKINNON will be able to complete all of your repairs. He is unflappable, calm, and extremely skilled. Email him at GARYMCKINNONCYBERSERVICES@GMAIL.COM or Text +1 607 764 0018 .
After falling victim to fraud twice trying to recover my stolen USDT, I gave up on the possibilities of ever being able to have it recovered until Gear Head Cyber Panacea was recommended on Quora and I was very grateful to have come across the article as they recovered 85% of my stolen USDT and so I decided to share this for anyone else that might be in need of their services..you can reach them on Gearheadcyberpanacea AT gmail DOT com or check out their website GEARHEADPANACEA dot COM
I advice you to contact: HENRYCLARKETHICALHACKER AT G MAIL COM he is good in hacking into any database, delete record, improve credit score, spy on whats-app, text, phone, emails, as long as it\'s hack he is great, you won\'t be disappointed, cheap and fast, he saved my relationship
Leave Comment
More things to do on myseatime

MySeaTime Blogs
Learn the difficult concepts of sailing described in a easy and story-telling way. These detailed and well researched articles provides value reading for all ranks.

Seafarers Question Answers
Ask or answer a question on this forum. Knowledge dies if it remains in our head. Share your knowledge by writing answers to the question

MySeaTime Podcast
This podcast on the maritime matters will provide value to the listeners. Short, crisp and full of value. Stay tuned for this section.
A very good effort sir. Very crisp and simple to understand.
Thank you Krishna..
For what? Flat earth or undependable thousand of satellites that cant give GPS. Flat maths sure help to calculate :)
thank you for this sir, how about plotting celestial observation in furuno ECDIS?