
I am going to be brutally honest with you.
To read about how Doppler log works is really a boring task.
What makes it confusing also is that there is no clarity in which this topic is usually explained.
And believe me, writing about it is equally boring too.
But then I received too many questions on Doppler log that I thought of taking up the task of writing on this topic.
So let us discuss about Doppler log but first let us look at the regulation by which we need to have a speed log on board.
Requirement for Doppler log
As per SOLAS Chapter V, Regulation 19.2.3.4,
All ships of 300 GRT and upwards and all passenger ships irrespective of size shall be fitted with a speed and distance measuring device, or other means , to indicate speed and distance through water.
Doppler log is one of such equipment that measures speed and distance through water.
EM log is another equipment that measures speed and distance through water but Doppler log is what is usually preferred by the owners.
Speed through water is required to be fed into the RADAR and speed through water is what we need to use for collision avoidance.
Briefly this is because, with speed through water we see the aspect of the other vessel and we can correctly judge which rule would apply to a collision situation.
I have covered this in detail in this blog and I would refrain myself to discuss that here.
Doppler effect
Time to get our hands dirty. If we need to understand Doppler log, we have to know few things about Doppler effect.
But don’t worry.
I will serve only what we need to chew.
While trying to understand Doppler effect, one mistake we make is to try to re-invent the wheel.
We try to think the way Christian Doppler (Inventor of Doppler effect) might have thought.
Well, to understand Doppler effect (and Doppler log), we don’t need to think that way.
Christian Doppler (and many scientists after him) have already proved his theory and we simply need to believe it and understand what it is.
And when we think that way, the theory is quite simple.
As per this theory
The Doppler effect (or the Doppler shift) is the change in frequency or wavelength of a wave for an observer who is moving relative to the wave source.
Now don’t worry, hold your guns !!!
I will explain it in simple words.
Let us say you are standing on road and there is an ambulance that is coming closer to you.
The frequency of its horn as heard by you will be more than its actual frequency . Now when I say frequency, many think of it as the loudness of the horn.
No, that is not what we are talking about here.
To make it simpler, let us say the sound of this ambulance horn is Ti………Tu Ti…….Tu Ti……..Tu
If neither you or ambulance is moving, you will hear this same sound pattern.
The sound will louder if the ambulance is closer but the irrespective of the distance the pattern of the sound will remain same.
Now if the ambulance is moving away from you at a speed, you will hear it something like
Ti………………………Tu Ti………………………Tu Ti………………………Tu
And if the ambulance is moving towards you, the horn will seem sounding like
Ti…Tu Ti….Tu Ti…Tu
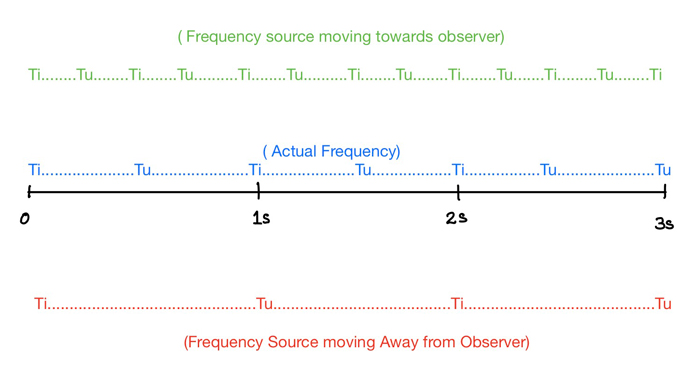 In other words, as the ambulance moving closer to or away from the observer, one cycle of sound will take different time to complete.
In other words, as the ambulance moving closer to or away from the observer, one cycle of sound will take different time to complete.
That is, the frequency of the horn will change if the ambulance is moving with respect to the observer.
As Christian Doppler observed the change in frequency depends upon the relative speed of the source of frequency.
Now that was the most non-technical way of explaining something like Doppler effect.
Technically, this graph is what Doppler effect is all about.
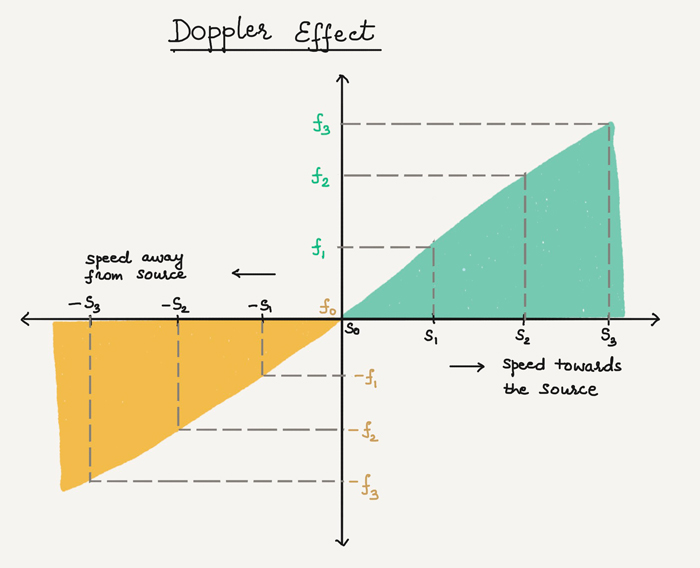
When observer and source of frequency (for example Ambulance horn in our example) are stationary (S0), frequency received at the observer will be same as the actual frequency (f0).
When the source of frequency is moving towards (or Away from) the observer, the received frequency at the observer will change (at speed S1, Frequency is F1 and so on).
Christian Doppler gave the formula to calculate this frequency shift.
The formula to calculate this change in frequency is
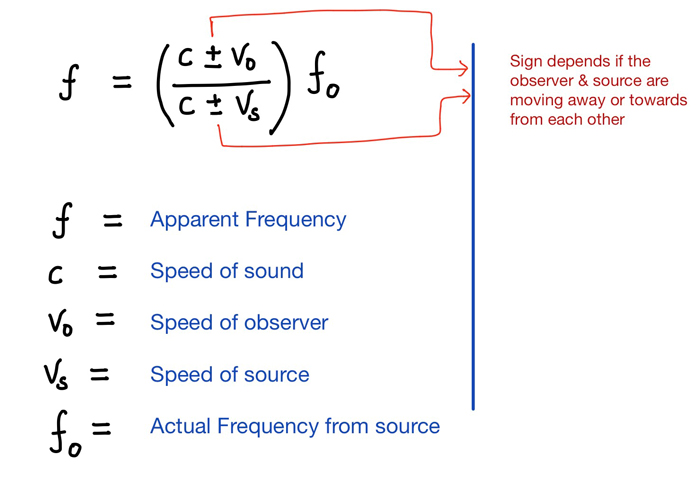
This formula and the Doppler effect has been used to develop many equipment.
Did you know that even the speed meter used by traffic police to measure the speed of the cars (to catch over-speeding cars) is also based on Doppler effect?
And of course one of such equipment is Doppler log to measure the speed of the ship through water.
Working principle of Doppler log
Doppler log uses the principle of Doppler shift to calculate the speed through water.
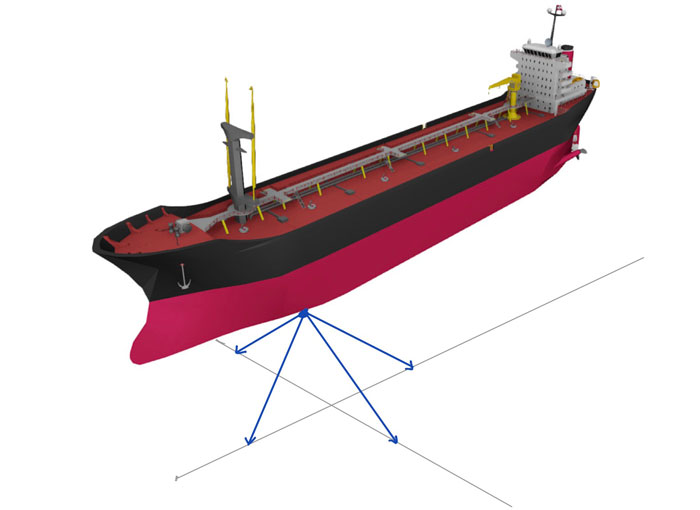
A wave transmitter is installed at the bottom of the ship which transmits waves at an angle (usually 60 degrees) to the ship’s keel.
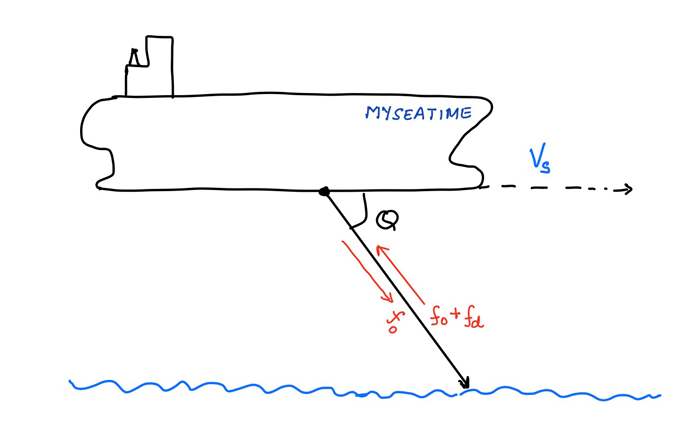
Let us say it transmits the wave at frequency f(o) and the received frequency after reflection is f(o) + f(d).
Now in the case of Doppler log, the formula for Doppler effect has been simplified as
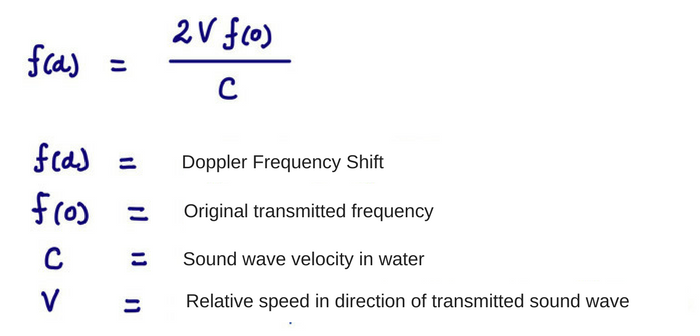
Where V is the speed of the ship in the direction of the transmitted wave.
As we would know the angle of the beam with respect to the keel, a co-relation can be drawn between this speed and actual speed of the ship in forward direction.
Transceiver will have both the frequencies f(d) and f(o) known. We know the sound wave velocity in water.
The only unknown is the speed of the vessel (V) which Doppler log can calculate easily with the above formula.
Speed through water or speed over ground
This is one of the most common doubt seafarers have about Doppler log. The Doppler log measures the speed with respect to the surface reflecting the transmitted wave.
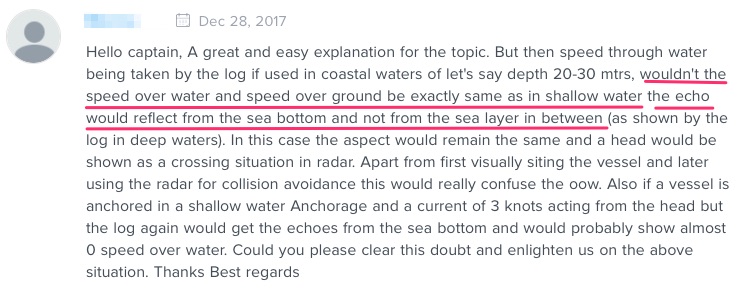
In deep water the transmitted wave gets reflected by water layer which gets denser as the depth increases.
A depth of 200 meters is perfect for the wave to get reflected.
But does that mean in lesser depths, the Doppler log can only measure speed though ground?
Not exactly.
The modern Doppler logs are advanced enough to have the transmitted wave reflected from the water layer with as less under keel depth as 3 meters.
JRC Doppler log claim to measure the speed through water even when depth below keel is as less as 2 meters.
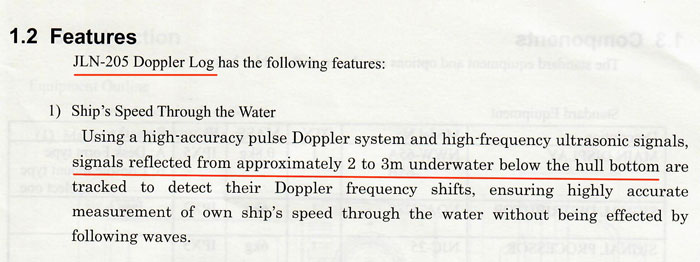
In fact, that is the IMO performance standard required for the speed logs fitted on ships (more on that later in this blog).
So as long as the depth below the transducer is more than 3 meters, the Doppler log can measure speed through water.
Some Doppler logs will also have the functionality to choose the tracking mode. The three tracking modes available are
- Water (Measure speed through water)
- Ground (Measures speed over ground)
- Auto (Selects water mode or ground mode automatically as per depth)
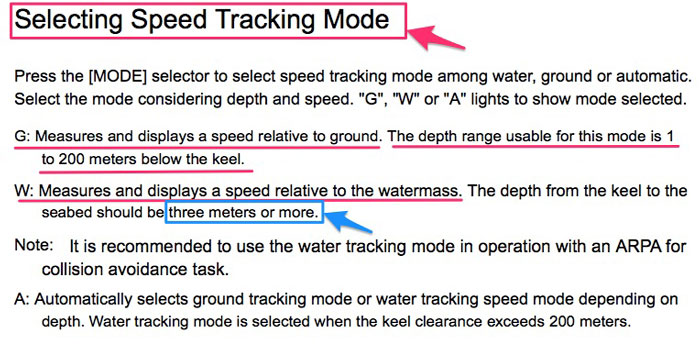
Well if you want to consider this as a limitation of Doppler log, you can. But more than 3 meters depth below the keel is what it requires to measure speed through water.
If the mode is not changed to ground (or auto) when the depth below keel is less than 3 meters, Doppler log will show errors in the speed.
But the option to change modes are not present in all makes and model of the Doppler log.
Some Doppler log only measures what it is supposed to measure, which is speed through water.
In depths less than 2~3 meters below keel, these Doppler logs displays the GPS speed for which a GPS connection to the Doppler log is required.
Errors of Doppler log
Traffic police measures the speed of the moving vehicles using the equipment that works on Doppler shift.
And these measurements are quite accurate.
But ship is a different place altogether. We do not have ideal situations to have the equipment measure as accurately as on land.
But all of these potential errors are taken into account and corrected for in the Doppler logs.
Let us discuss these errors and how these are corrected.
1. Error due to ship’s motion
When the ship is moving, it may not move only in fore and aft direction. The ship may yaw, roll or pitch.
And when ship does that the angle of the beam (based on which the calculations are done in the processor) changes.
In fact, this will also be the case in different trim and list cases of the vessel.
This error is eliminated by collecting and averaging the data from more than one beam. This configuration of the beams is called Janus configuration.
By having this configuration, any positive error in data of one beam is cancelled by the negative error from the data of second beam.
In fact, it is because of Janus configuration that Doppler log is able to measure side speed (in athwart ship direction) of the vessel which GPS does not measure.
GPS provides two speeds.
- Speed towards the vessel’s heading
- Speed towards vessel’s course made good
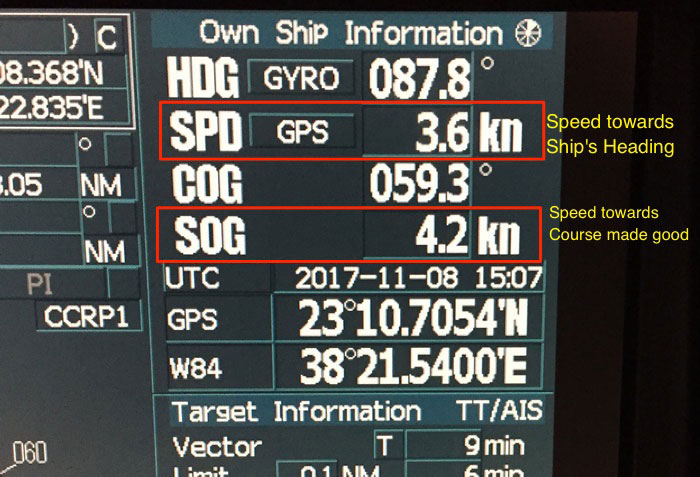
But when vessel is approaching a berth, we are also interested in knowing the speed at which the ship will touch the berth (0.3 knots or less is the ideal speed).
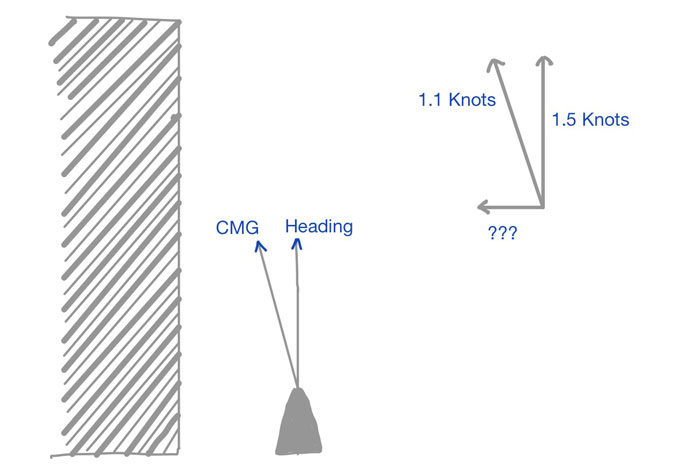
GPS does not provide this information. This is where speed read out from the Doppler log helps. Doppler is able to calculate this speed because of Janus configuration.
2. Error due to reflections from the air bubbles
For the Doppler log to work accurately, the reflected beam need to be the one that Doppler log thinks it is.
If there are false reflections, Doppler log will show wrong readings.
One of the reason for the wrong reflections could be the beams getting reflected from the air bubbles generated because of ship’s motion.
This error is negated by carefully locating the transducer to a location where the possibility of generation of bubbles is minimum.
3. Error due to change in velocity of sound in water
We know the velocity of sound in water but that is in ideal conditions and at a particular temperature.
But as the sea water temperature changes the velocity of the sound waves in water would change significantly.
If not corrected, this would bring an error in the Doppler log readings.
This error is corrected by having a temperature sensor fitted near to the transducer which measures the sea water temperature.
The correction in speed of sound in water because of temperature is then applied in the processing unit of the Doppler log.
4. Other technical errors
Apart from the errors listed so far, there can be few errors related to the electronic equipment used in the Doppler log.
For example, the frequency transmitted could be slightly different from the one taken for calculation.
Any of these errors are eliminated during initial testing of the Doppler log equipment and during sea trial.
IMO Requirements for Doppler log
IMO resolution A.824 (19) as amended by MSC 96(72) gives the details of the performance standards for the Doppler logs fitted on ships.
The few of the main requirements as per this are
- The device measuring speed and distance through the water should meet the performance standard in water of depth greater than 3 m beneath the keel
- Error in the measured and indicated speed for a digital display should not exceed 2% of the speed of the ship, or 0.2 knots, which is greater. For analogue display the error should not exceed 2.5% of the speed of the ship or 0.25 knots whichever is greater.
- The performance of the equipment should be such that it will meet the requirements of performance standards when the ship is rolling up to 10 degrees and pitching up to 5 degrees.
Conclusion
There is a lot of confusion about the purpose of having a Doppler log on the wheel house.
Most of us know that Doppler log is required to measure the speed through water and is required as per SOLAS Chapter V.
But here is the main confusion.
How can a Doppler log measure speed through water in shallow waters?
Well, the IMO performance standard requires that the speed logs must be able to measure speed through water with UKC of up to 3 meters.
Most of the speed logs (and Doppler logs) can measure the speed through water even when the UKC is around 3 meters.
Apart from that Navigators must be aware of the errors that a Doppler log can have and how these are corrected.
To understand the Doppler log errors, we must briefly know the principle of operation of Doppler log.
Share this:

About Capt Rajeev Jassal
Capt. Rajeev Jassal has sailed for over 28 years mainly on crude oil, product and chemical tankers. He holds MBA in shipping & Logistics degree from London. He has done extensive research on quantitatively measuring Safety culture onboard and safety climate ashore which he believes is the most important element for safer shipping.
Search Blog
16 Comments

My understanding of the Performance Standard, is as follows: "The equipment should comply fully with its performance standard at forward speeds up to the maximum speed of the ship and in water of depth greater than 3 m beneath the keel."
Sir, can't the athwart ship movement be found from SB (+ve/-ve) on radar screen? Is it derived from GPS COG & SOG?
Can you elaborate the difference between Bottom tracking speed ,SOG, STW
Sir I have heard one more term related to speed which is observed speed..so could u plz explain difference between log speed and observed speed
Sir your blog is really interesting but quite confused. what is the difference between sog from doppler log (bottom track) and sog from the gps.
Thnq for sharing Good Info Domestic house hold water meters is a device used to measure the amount of water consumed in a building.
Why is the velocity of the ultrasonic sound through water of any importance if the only thing measured is the frequency difference is measured. I mean it doesn't matter how long the signal has been underway doesn't it? The doppler shift is only a frequency shift.
Thank you ... I got this topic very well.
Nice Blog sir
Dear Sir, Thank you so much for this article and all your work. I have one question, during approaching to berth should DL be set on bottom or speed through water? Thanks.
Very helpful blog Capt for seafarers like me which have just started on this career. I prefer reading your blogs rather than seeing it in videos. As you have the skill to elaborate your points part by part for us to gain a full understandinf of it. More powers to you and hope you will not be tired to make more blogs.
Thank you sir for explaining in depth doppler log, can you please describe more on how Janus configuration helps in eliminating Pitching error.
1 word: EXCELLENT
Good day sir! i have a doubt . The speed showing along cog by GPS. But While ship get alongside how Janus configuration get activated then to get athwart ship speed?
is it necessary that speed log connected to ships radar while GPS connected to radar? PSC OFFICERS IN SOME CONTRY EMPHASISI THAT SPEED LOG MUST BE CONNECTED TO SHIPS RADAR.
Leave Comment
More things to do on myseatime

MySeaTime Blogs
Learn the difficult concepts of sailing described in a easy and story-telling way. These detailed and well researched articles provides value reading for all ranks.

Seafarers Question Answers
Ask or answer a question on this forum. Knowledge dies if it remains in our head. Share your knowledge by writing answers to the question

MySeaTime Podcast
This podcast on the maritime matters will provide value to the listeners. Short, crisp and full of value. Stay tuned for this section.
Good day Captain, Yet another master piece. Thank you so much for the awesome blog. This really clears all my doubts & every thing to know about doppler log. I have a furuno doopler on board and makers mention working depth more than 3 mtrs below keel for speed over water. I will put up a caution notice on the radars stating the same, just after reading this blog.